
The Gyroscopic Inertial Thruster
from David Cowlishaw
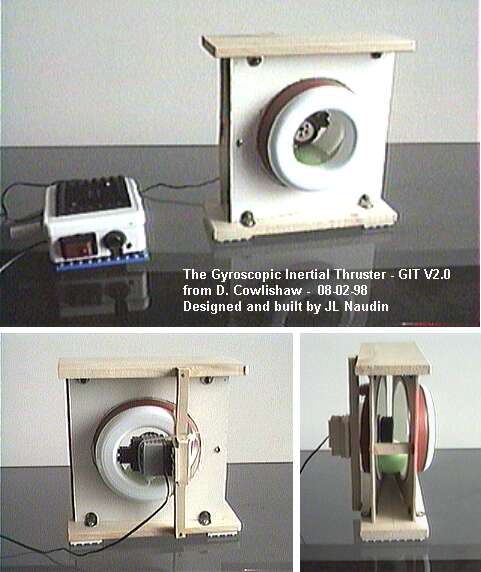
The GIT V2.0 designed and built by JL Naudin
created on 08-02-98 - JLN Labs - last update on 08-16-98
The Gyroscopic Inertial Thruster (GIT) uses the momentum and the energy from the centrifugal force of an orbiting hollow ball for producing a linear impulse.
The GIT (Gyroscopic Inertial Thruster) is a project from David Cowlishaw, this device converts kinetic energy from the translation into rotational energy for generating a thrust.
The GIT uses an hollow ball which accelerates and decelerates during its orbiting path. At the back of the GIT, the major part of the translational energy is converted into rotational kinetic energy (the ball decelerates) and, in front of the GIT, the rotational energy is converted into translational energy (the ball accelerates). This effect produces an unbalanced centrifugal force (due to this linear speed conversion, the centrifugal force is greater in front than the centrifugal force at the back) and this contributes to generate an unidirectional thrust.
The GIT is an Inertial Propulsion Engine (IPE). This device consumes electrical energy but generates a thrust like a propeler. An inertial propulsion engine (IPE) is a mechanical device which uses a standard electrical motor drive for producing a motion.
The GIT V2.0 specifications :
Total GIT weight : 360 g
Orbiting hollow plastic ball : 40 mm diam, 18 g weight
orbiting turn speed : 355 RPM (AVG)
Average orbiting path : 80 mm diam.
Max. Orbiting path : 107 mm
Largest gauge : 35 mm
Narrowest gauge : 8 mm
Motor : LegoTechnic ref 5114
Average translation speed on a smooth surface : 80 meters per hour
See the GIT v2.0in action in REAL VIDEO :

click here to see the GIT video demo (153k)
( if you don't have the RealPlayer 5.0, you may download it freely at : http://www.real.com/products/player/ )
Read also the "Simplified study of GIT" by Jean de Lagarde
You may visit also the David Cowlishaw's GIT Web site at: http://www.open.org/davidc/index.htm
If you need more informations or if you have any suggestions send me your Feedback
![]() Email
: [email protected]
Email
: [email protected]
Return to the Inertial propulsion main page